Twitter est un éleveur de poulets en batterie. L’objectif principal de cet éleveur est que ça piaille et que ça se batte dans la basse cour.
Pour cela Twitter multiplie les contraintes pour vous énerver et vous faire réagir : limitation des messages à 140 caractères, mise en valeurs des messages les plus polémiques, publicité incessante, …
L’utilisation de twitter est mauvaise pour les nerfs et produit de la mauvaise viande.
Mais il existe un autre système basé sur de l’élevage de poulets en liberté avec des restrictions moindre et moins d’énervement : mastodon
https://joinmastodon.org/
Du bon poulets de Loué ™ 😉
Pour utiliser mastodon il faut choisir parmi les nombreux élevages disponibles dans le monde:
Et si l’on se sent l’âme d’un éleveur il est même possible de monter le sien.
Du point de vue du poulet, mastodon fonctionne comme twitter (l’énervement en moins). Les messages sont limités à 500 caractères, on peux faire des «hashtag» comme dans twitter.
On ne parle pas de twit mais de pouet (toot) et re-pouet. Il est possible de suivre les pouets des autres poulets, même quand ils sont dans un autre élevage.
Si vous souhaitez me suivre, mon poulet se trouve dans l’élevage du parti pirate et se nomme Martoni :
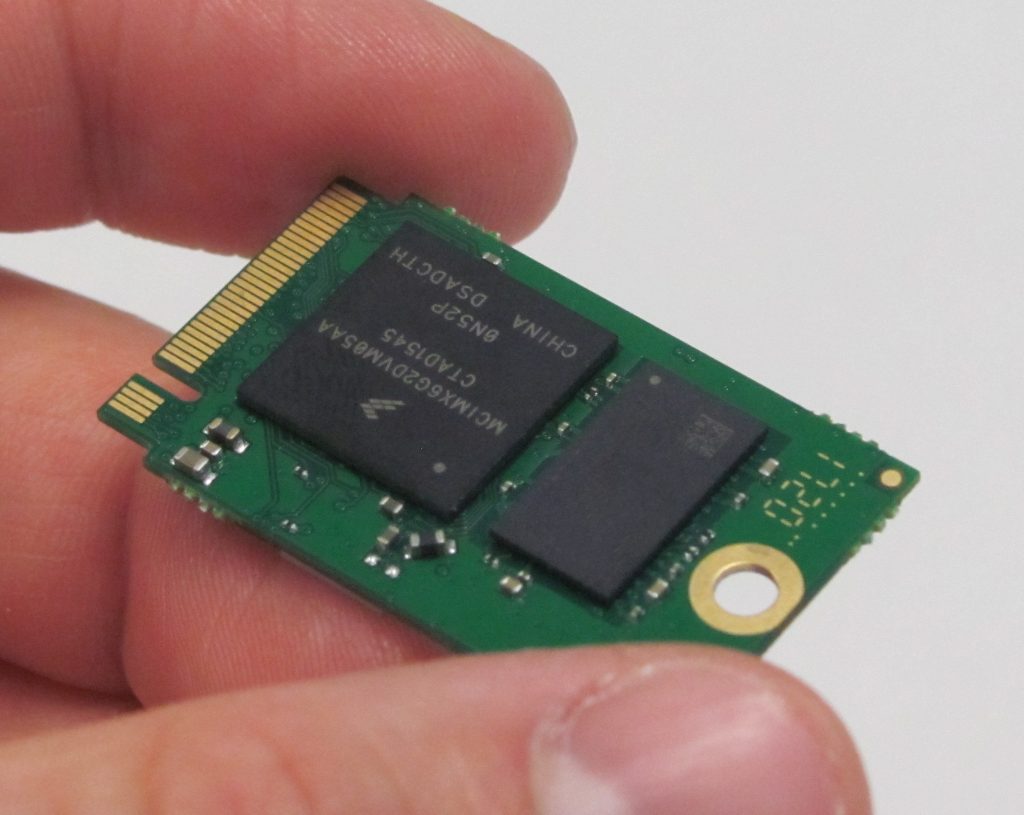
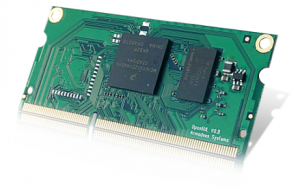
La nouvelle Opos6ul_nano qui tient entre deux doigts
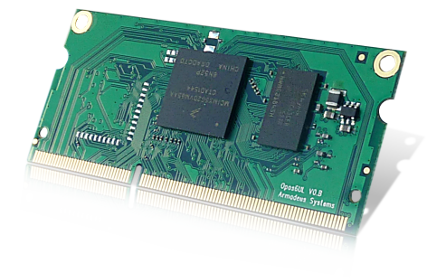
L’OPOS6UL est une petite carte Linux embarqué à base d’i.MX6UL permettant de faire tourner ses applications Raspberry-Pi(TM) sur un produit industriel.
l’opos6UL sodimm board avec le Wifi/Bt et 4GB eMMC
Cette carte est déjà relativement petite au format SODIMM, mais visiblement elle était encore trop grande pour certain. C’est pourquoi Armadeus Systems sort maintenant la version ultra-mini de cette carte au format NGFF (M.2) : l’OPOS6UL_NANO.
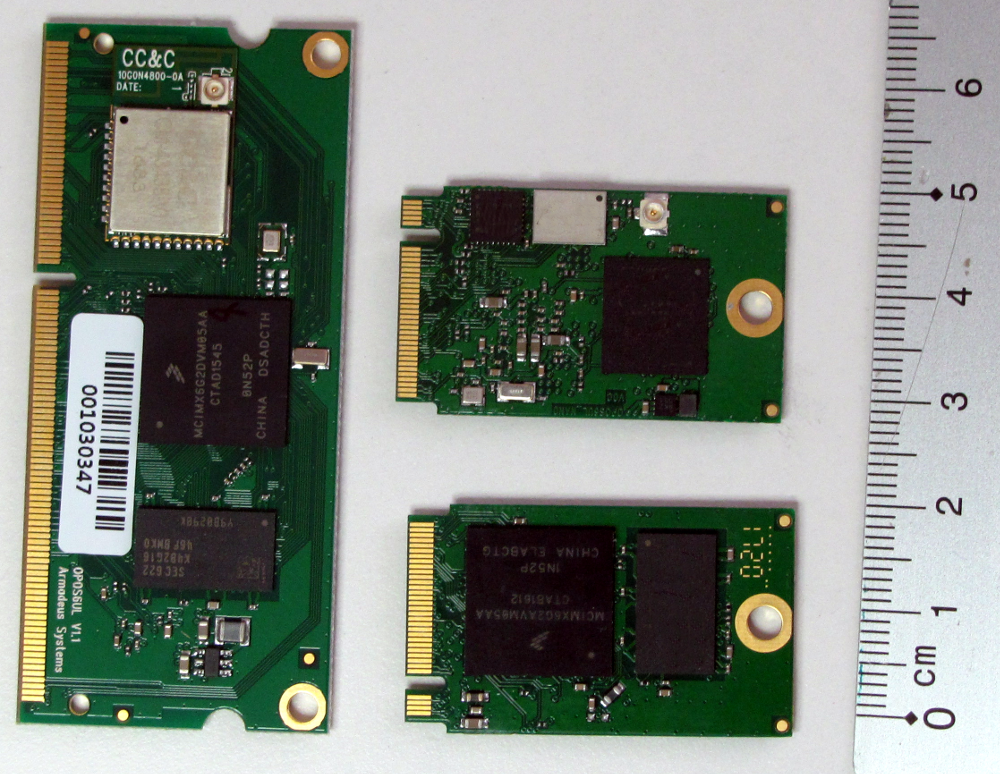
Carte quasiment 3 fois plus petite que sa grande sœur, mais avec les même caractéristiques qui ont fait le succès de l’opos6ul :
Linux embarqué bien sûr
i.MX6UL ou i.MX6ULL
Wifi
BT
Ethernet
USB2
SPI
I²C
GPIO
…
Un aperçu de la taille de l’opos6ul_nano à coté de sa grande sœur.
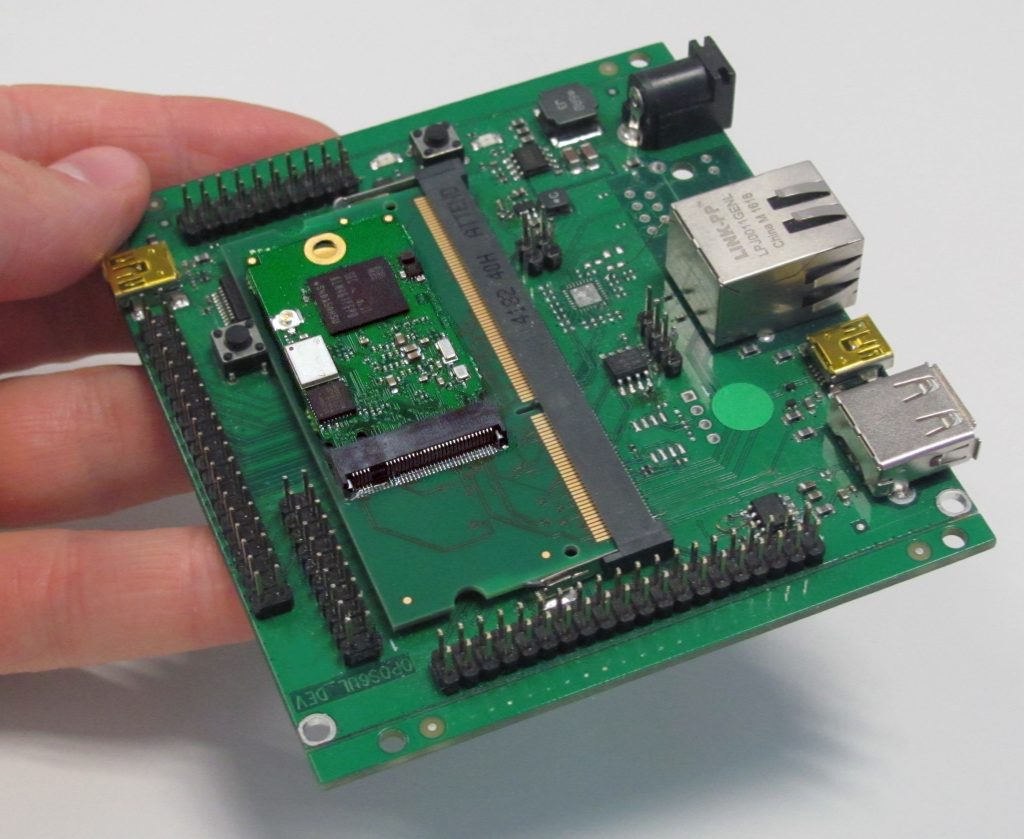
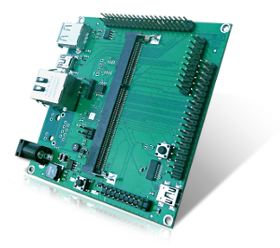
Le module est compatible avec la carte de développement de l’opos6ul en utilisant un adaptateur.
Bien sûr il est possible de monter la nouvelle opos6ul_nano sur la carte de développement de l’opos6ul.
Il est donc toujours possible de faire un développement «Raspberry-Pi compatible» grâce au connecteur Raspberry-Pi(TM) présent sur cette carte de développement.
« Si les lois des droits de l’homme entravent la lutte contre l’extrémisme et le terrorisme, nous changerons ces lois pour protéger le peuple britannique. »
Je viens de claquer mon fric sur un coup de tête d’investir dans une tablette graphique Wacom Intuos Draw. L’objectif est de pouvoir faire sur ordinateur les petits dessins que j’ai appris à faire en suivant le bouquin «you can draw in 30 days».
J’ai quand même cherché une tablette qui soit compatible avec Linux. L’idéal aurait-été que TuBranchesÇaMarche sur une Debian Jessie.
Mais ça n’a pas tout à fait été le cas puisqu’il a tout de même fallu recompiler le driver. Bon on en est finalement pas très loin la recompilation du driver est vraiment très simple et se fait très vite.
En règle générale on aime bien avoir la version du firmware générée sur lequel tourne notre FPGA. Cependant, pour intégrer une date de compile, une version de logiciel ou autre dans un bitstream, cela ne se fait pas très simplement.
L’exemple ici est certainement quick&dirty, mais c’est une solution possible pour résoudre ce problème. Le système est conçu via le «blocs designer» de vivado et contient un microblaze.
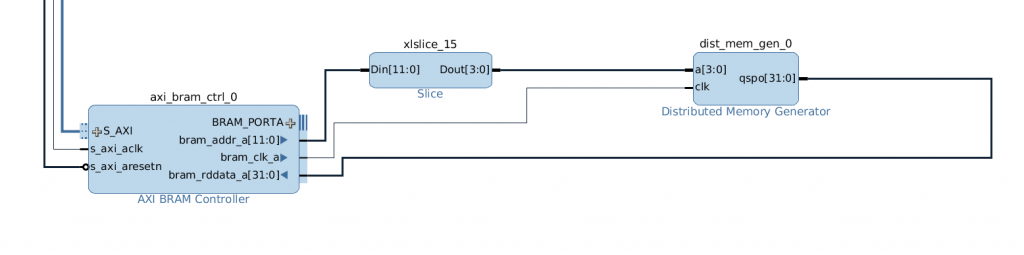
Pour pouvoir ajouter des «registres» spécifiques sans avoir à coder en HDL on intégrera un bloc de ROM nommé «Distributed Memory Generator». Pour intégrer ce bloc dans l’espace mémoire du Microblaze on ajoutera un contrôleur de ram AXI comme le montre la saisie d’écran ci-dessous:
Ce bloc peut être configuré via un fichier texte avec l’extension «.coe» qui contiendra les valeurs.
La variable memory_initialization indique la base (ici du décimal) des valeurs données dans le vecteur memory_initialization_vector. Dans cet exemple, trois valeurs sont données : la période de l’horloge du contrôleur de DDR, la date en secondes unix et la version.
Plutôt que d’avoir à modifier notre fichier *.coe à chaque synthèse, nous allons écrire un script tcl qui sera appelé automatiquement par vivado à chaque synthèse/placement-routage. Le TCL est un langage de script que beaucoup de logiciels d’électronique sont capable d’éxecuter, c’est le cas de vivado (tcl version 8.5).
Le répertoire du projet est donné par la commande tcl :
set current_project_dir [get_property DIRECTORY [current_project]]
On peut l’afficher au besoin dans la console «Messages» de vivado avec puts :
puts $current_project_dir
période du contrôleur de DDR
L’idée ici est d’aller chercher l’information dans le fichier datasheet.txt généré par le fucking MIG. La méthode Quick&Dirty pour récupérer l’info dans le fichier est de découper le texte à coup de split et de lindex pour se focaliser sur la «Design Clock Frequency».
...
/*******************************************************/
/* Controller 0 */
/*******************************************************/
Controller Options :
Memory : DDR3_SDRAM
Interface : AXI
Design Clock Frequency : 1562 ps ( 0.00 MHz)
Phy to Controller Clock Ratio : 4:1
Input Clock Period : 5077 ps
CLKFBOUT_MULT (PLL) : 13
DIVCLK_DIVIDE (PLL) : 2
VCC_AUX IO : 1.8V
Memory Type : Components
Memory Part : MT41K1G8SN-125
Equivalent Part(s) : --
Data Width : 8
ECC : Disabled
Data Mask : enabled
ORDERING : Normal
...
La période est ainsi stockée dans la variable $period :
# Get DDR period
set fp [open "$current_project_dir/../../../projet.srcs/sources_1/bd/ {...} /datasheet.txt"]
set filedata [read $fp]
set data [split $filedata "\n"]
foreach line $data {
if {[regexp {Design} $line]} {
set period [expr [lindex [split [lindex [split $line ":"] 1] "ps"] 0]]
}
}
version
Pour la version c’est à nous de définir un «generic» dans le projet avec le nom que nous voulons (par exemple ProjectVersion). Ce generic se définit dans le menu setting du projet, pour cette exemple il sera défini à ‘1’, quelle originalité !
Ce generic se retrouve ensuite dans le fichier xml du projet au format *.xpr. De la même manière que pour la period du contrôleur de DDR, nous allons lire ce fichier au moyen d’une savante boucle de découpage split et lindex:
set fp [open "$current_project_dir/../../project.xpr"]
set filedata [read $fp]
set data [split $filedata "\n"]
foreach line $data {
if {[regexp {ProjectVersion} $line]} {
set ProjectVersion [lindex [split [string trim $line] "\""] 3]
}
}
date
Pour la date c’est beaucoup plus simple puisqu’il existe une commande tcl (>=8.5) qui nous donne les «seconds unix» : clock seconds.
set thetime [clock seconds]
Enregistrement du fichier coe
Il suffit pour cela d’ouvrir en écriture le pathname que nous désinons écrire puis ajouter les valeurs avec puts :
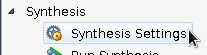
Pour que notre script tcl soit appelé automatiquement par vivado il faut le définir comme un «hook» de pre-synthèse. Pour cela il faut se rendre dans le menu de configuration de la synthèse:
Puis sélectionner notre script name.tcl dans l’option tcl.pre (pour pre-synthèse).
Le script sera exécuté dans le répertoire :
project/project.runs/run_name/
Il suffit maintenant de lancer la synthèse pour que notre «hook» soit lancé avant la synthèse et remplisse correctement la rom de paramètres de notre design.
Il est assez pénible de devoir lancer l’interface graphique vivado et d’ouvrir un projet juste pour aller «flasher» un bitstream sur un FPGA. Surtout quand on est sorti du «mode développement» pour passer en «mode usage» de notre FPGA. Voici donc une méthode pour pouvoir configurer son FPGA par JTaG en mode «console».
C’est finalement plutôt bien expliqué dans le document UG835 (page 934). Mais je le poste quand même ici par soucis de référencement. Car je n’ai pas trouvé directement le howto quand j’ai cherché la méthode.
Une fois qu’on a alimenté son FPGA et que la sonde USB-Jtag est branchée et reconnue par le système, on peut lancer Vivado en mode console via la commande :
$ vivado -mode tcl
On tombe sur l’invite de commande suivante :
$ vivado -mode tcl
****** Vivado v2016.4 (64-bit)
**** SW Build 1756540 on Mon Jan 23 19:11:19 MST 2017
**** IP Build 1755317 on Mon Jan 23 20:30:07 MST 2017
** Copyright 1986-2016 Xilinx, Inc. All Rights Reserved.
Vivado%
Il faut ensuite démarrer le serveur et s’y connecter :
Vivado% connect_hw_server
INFO: [Labtools 27-2285] Connecting to hw_server url TCP:localhost:3121
INFO: [Labtools 27-2222] Launching hw_server...
INFO: [Labtools 27-2221] Launch Output:
****** Xilinx hw_server v2016.4
**** Build date : Jan 23 2017-19:28:34
** Copyright 1986-2016 Xilinx, Inc. All Rights Reserved.
localhost:3121
On peut connaître le nom de la sonde qui sera utilisée par défaut via la commande current_hw_target.
Ça y est, Armadeus sort sa carte Opos6ul à base d’imx6ul. Cette carte intéressera tous les bricoleurs de Raspberry Pi qui cherchent à industrialiser leur produit.
The new opos6UL sodimm board with a Wifi/Bt and 4GB eMMC
En effet, l’un des principal problème de la raspberry pi est la difficulté d’un approvisionnement pérenne dans le temps.
Armadeus garantit un approvisionnement de ses modules pendant au moins 10 ans. Ce qui donne une marge confortable pour concevoir son produit et le sortir sur le marché.
Cerise sur le gâteau, le kit de développement minimal pour commencer à jouer avec n’est qu’à 49€ht. Plus d’excuse pour se lancer dans le Linux embarqué et monter en gamme ses produits.
Je n’ai pas trouvé de listes des primaires ouvertes sur le web pour les élections présidentielles. Alors je pose ça là
Laprimaire.org : Gratuit ! Mais vous pouvez faire un don pour encourager le concept. Il faut 100 000 personnes inscrites pour que la primaire ait lieu, inscrivez vous vite c’est gratuit. Il y a déjà 62000 inscrits
Écolos : 5€ (tain c’est cher), s’inscrire avant le 1 octobre 2016 et vote par correspondance (internet ?)
Alors voila, vous avez bien avancé dans votre projet FPGA avec Vivado. Mais vous souhaiteriez le conserver et surtout le versionner de manière à pouvoir le reproduire et le réutiliser ailleurs.
Le document xapp1165 de Xilinx donne la marche à suivre, il suffit de lire le chapitre «project mode».
Voici un petit résumé:
write_project_tcl
Tout d’abord il faut bien sûr lancer vivado et ouvrir son projet. Une fois cela fait, il faut se rendre dans la console tcl et lancer la commande write_project_tcl:
write_project_tcl monprojetperso_project
INFO: [Vivado-projutils-8] Tcl script 'monprojetperso_project.tcl' generated in output directory '/usr/local/opt/Xilinx/Vivado/2016.2/bin'
INFO: [Vivado-projutils-15] Please note that by default, the file path for the project source files were set wrt the 'origin_dir' variable in the
generated script. When this script is executed from the output directory, these source files will be referenced wrt this 'origin_dir' path value.
In case this script was later physically moved to a different directory, the 'origin_dir' value MUST be set manually in the script with the path
relative to the new output directory to make sure that the source files are referenced correctly from the original project. You can also set the
'origin_dir' automatically by setting the 'origin_dir_loc' variable in the tcl shell before sourcing this generated script. The 'origin_dir_loc'
variable should be set to the path relative to the new output directory. Alternatively, if you are sourcing the script from the Vivado command line,
then set the origin dir using '-tclargs --origin_dir '. For example, 'vivado -mode tcl -source monprojetperso_project.tcl -tclargs --origin_dir ".."
WARNING: [Vivado-projutils-10] Found source(s) that were local or imported into the project. If this project is being source controlled, then
please ensure that the project source(s) are also part of this source controlled data. The list of these local source(s) can be found in the generated script
under the header section.
Un message d’information nous indique où se trouve le script tcl ainsi généré (ici : /usr/local/opt/Xilinx/Vivado/2016.2/bin). Il suffit donc de copier ce script dans le répertoire que nous souhaitons versionner.
cd ~/monprojet/
cp /usr/local/opt/Xilinx/Vivado/2016.2/bin/monprojetperso_project.tcl
Mais ça n’est pas le seul fichier que nous devons versionner si nous souhaitons pouvoir le reconstruire. Les autres fichiers à sauvegarder son indiquer dans l’entête du script :
#*****************************************************************************************
# NOTE: In order to use this script for source control purposes, please make sure that the
# following files are added to the source control system:-
#
# 1. This project restoration tcl script (monprojetperso_project.tcl) that was generated.
#
# 2. The following source(s) files that were local or imported into the original project.
# (Please see the '$orig_proj_dir' and '$origin_dir' variable setting below at the start of the script)
#
#
#
# 3. The following remote source files that were added to the original project:-
#
# "/usr/local/projects/monprojetperso/hardware/monprojetpersomonoproc/monprojetperso/monprojetperso.srcs/sources_1/bd/pea_monprojetperso/pea_monprojetperso.bd"
# "/usr/local/projects/monprojetperso/hardware/monprojetpersomonoproc/monprojetperso/monprojetperso.srcs/sources_1/imports/hdl/pea_monprojetperso_wrapper.vhd"
# "/usr/local/projects/monprojetperso/hardware/monprojetpersomonoproc/monprojetperso/monprojetperso.srcs/sources_1/bd/pea_monprojetperso/ip/pea_monprojetperso_mig_7series_0_0/mig_a.prj"
# "/usr/local/projects/monprojetperso/hardware/monprojetpersomonoproc/monprojetperso/monprojetperso.srcs/sources_1/bd/pea_monprojetperso/ip/pea_monprojetperso_mig_7series_0_0/mig_b.prj"
# "/usr/local/projects/monprojetperso/hardware/monprojetpersomonoproc/monprojetperso/monprojetperso.srcs/constrs_1/new/monprojetperso_constraints.xdc"
#
#*****************************************************************************************
Open Logic is an open-source VHDL library of vendor-independent FPGA components like FIFOs, CDCs, and interfaces, designed to save you time. — Permalink
Pas sûr que les salaires ne grimpent pour autant :( Ça c'est quand on pense comme un économiste que la rareté entraîne des prix plus élevés. Mais l'exemple des femmes en inde nous montre plutôt l'inverse : Il y a un déséquilibre femme/homme en inde, c'est pas pour autant qu'elles sont bien traitées ! — […]