Aujourd’hui les citoyennes et citoyens croulent sous les déchets plastiques. Ces déchets sont très difficile à recycler contrairement à ce qui peut être écrit sur les produits que l’on achète. Et leur tri pèse lourdement sur le budget des communes, tout ça pour finir en incinération dans la plupart des cas quand c’est pas pour aller polluer les cours d’eau et la mer avec des microplastiques.
Cela ne semble pas beaucoup émouvoir la pétrochimie et l’industrie du plastique qui continue à bourrer tout ce qu’on achète d’emballages plastiques à usage unique en tout genre. Cette industrie n’a d’ailleurs aucun scrupule à culpabiliser les citoyens. Après tout, ils n’ont qu’à trier !
Et si on inversait la charge mentale ? Si l’on rendait obligatoire la consigne sur tous les emballages contenant du plastique ? Mettons 5 centimes par emballage par exemple. Les consommateurs les ramèneraient volontiers au magasin qui serait à son tour contraint de retourner ces emballages à l’envoyeur. Charge à l’industriel de gérer ses déchets plastiques.
Cette consigne serait une grosse charge pour les magasins et les distributeurs qui hésiteraient à vendre des produits su-remballés de peur d’avoir à gérer toute la logistique du retour. Les industriels y réfléchiraient à deux fois avant de rajouter un emballage plastifié pour un lot de boites en cartons plastifiés contenant des tubes en plastique.
Bien sûr c’est une mesure qui va faire couiner le lobby du plastique et de la pétrochimie qui va devoir être mise au pas pour limiter la pollution des mer et des cours d’eau.
Voici une recette simple comme je les aime et qui font manger des légumes.
Légumes/pomme de terre du moments
quelques gousses d’ail sans le germe
Huile d’olive/tournesol (prendre un mélange c’est moins cher)
Paprika
sel
poivre
Laver/évider les légumes et les couper grossièrement (pas la peine d’éplucher).
huiler le plat avec un papier ménage
disposer les légumes tranches vers le haut
saler, poivrer, papriker et mettre un filet d’huile d’olive/tournesol sur chaque morceau (pas trop faut pas que ça baigne)
Enfourner à 180°C pendant 30 à 40 minutes (surveiller la cuisson avec la pointe d’un couteau)
Et voila c’est tout.
C’est très bon, on peut adapter les légumes et ça en fait manger. Pour les carnivore ça accompagne très bien tout un tas de viandes et pour les vegans ça ce suffit presque à lui même.
Le plus compliqué dans cette recette c’est de laver le plat à four.
Gaïa est une jeune femme qui vit dans un village peuplé de survivants au Flash. Le flash est une catastrophe qui a eut lieu une vingtaine d’années auparavant et qui a rendu tout le monde aveugle. Seuls les jeunes on put récupérer la vue mais ils la reperde avec l’âge, sans que personne ne sache pourquoi.
Depuis ce flash, plus aucun appareil électrique n’est capable de fonctionner. De même, les moteurs à explosions sont inopérants.
Gaïa est une jeune fille rebelle qui refuse d’obéir aux lois de sa communauté, elle apprend à faire du vélo avec le vieil ermite à l’écart du village alors que c’est interdit. Vieil ermite qui n’a pas perdu la vue comme toutes les personnes de son age étonnement.
Dans ce monde post-apocalyptique, seul les jeunes filles sont capable d’enfanter, elles perdent rapidement cette faculté en vieillissant. Il faut donc qu’elle tombe rapidement enceinte pour assurer la pérennité de la communauté, ce que Gaïa refuse bien sûr. Suite à une cérémonie assez trash organisée par les anciennes sur sa personne, Gaïa décide de fuir sur son vélo avec le vieil ermite et parcourir la région à la rencontre d’autres communauté dont elle ignorait jusqu’alors l’existence et coutume.
Cette épopée, entrecoupé de «chronique du flash» expliquant la vie d’avant, va montrer petit à petit la supériorité du vélo comme technologie résiliente, qui permet à la société de se réorganiser et assurer un avenir.
Le livre est édité par la maison suisse PVH éditions dont l’acronyme n’est pas clairement définit. L’éditeur est spécialisé dans la littérature de l’imaginaire et de science fiction. Le livre est disponible en epub et en papier dans un style cartonné assez sympathique.
Ploum est un «blogueur influent» dans le monde libre. C’est en effet un militant du logiciel libre de longue date. Celles et ceux qui suivent son blog depuis vingt ans retrouverons dans bikepunk toutes ses obsessions sur les claviers bépo, la plongée en apnée, l’anarchie, internet, la technologie, le web et les machines à écrire (qui ne sont pas en bépo pour le coup).
Pour piloter un ordinateur on utilise généralement un clavier, une souris, une manette, un joystik, la voix … mais il est possible de brancher également une pédale sur l’USB.
Tous le monde ne peut pas être shiva, du coup utiliser les pieds en plus des mains augmente les capacité de pilotage du PC.
J’en ai trouvé une chez mon dealer de chinoiseries préférés (aliexpress) que voici:
Une pédale USB pour rajouter des possibilité de pilotage au PC avec les pieds
Le truc est parfaitement détecté par Linux :
$ sudo dmesg -c
[22475.216342] usb 1-2.4.1: new full-speed USB device number 18 using xhci_hcd
[22475.337184] usb 1-2.4.1: New USB device found, idVendor=3553, idProduct=b001, bcdDevice= 0.00
[22475.337200] usb 1-2.4.1: New USB device strings: Mfr=1, Product=2, SerialNumber=0
[22475.337207] usb 1-2.4.1: Product: FootSwitch
[22475.337213] usb 1-2.4.1: Manufacturer: PCsensor
[22475.447253] input: PCsensor FootSwitch Keyboard as /devices/pci0000:00/0000:00:08.1/0000:04:00.3/usb1/1-2/1-2.4/1-2.4.1/1-2.4.1:1.0/0003:3553:B001.0015/input/input42
[22475.504991] input: PCsensor FootSwitch Mouse as /devices/pci0000:00/0000:00:08.1/0000:04:00.3/usb1/1-2/1-2.4/1-2.4.1/1-2.4.1:1.0/0003:3553:B001.0015/input/input43
[22475.505474] hid-generic 0003:3553:B001.0015: input,hidraw4: USB HID v1.11 Keyboard [PCsensor FootSwitch] on usb-0000:04:00.3-2.4.1/input0
[22475.510353] input: PCsensor FootSwitch as /devices/pci0000:00/0000:00:08.1/0000:04:00.3/usb1/1-2/1-2.4/1-2.4.1/1-2.4.1:1.1/0003:3553:B001.0016/input/input44
[22475.510708] hid-generic 0003:3553:B001.0016: input,hidraw8: USB HID v1.10 Device [PCsensor FootSwitch] on usb-0000:04:00.3-2.4.1/input1
Langage du code :PHP(php)
Il est vu comme un «PCsensor FootSwitch» dans l’interface USB HID input.
Si j’appuie dessus il écrit k avec mon mapping bépo. Avec un mapping azerty il est probable qui écrive b.
Pilotage
On trouve assez facilement des projets open source pour piloter la pédale sous linux en cherchant «PCsensor FootSwitch linux» sur duckduckgo par exemple. Ce qui est important avant de cloner un projet c’est de s’assurer que le notre est supporté histoire de se faciliter la tâche. Celui présenté ci-dessus à les références suivante :
idVendor=3553, idProduct=b001
Références qui sont données dans le projet footswitch de rgerganov par exemple.
Didier Tronchet est un dessinateur de BD (Jean-Claude Tergal) qui se déplace à vélo depuis son enfance.
En 2000 il écrit un livre nommé «Le petit traité de Vélosophie» pour faire la publicité des déplacements en vélo. À l’époque Didier se vante d’être précurseur. En 2020 il met tout ça à jour en bande dessinée.
Cette bande dessinée regorge de citations et d’illustration militante, beaucoup de ses planche pourrait-être imprimé en affiche et collées partout pour militer.
Menace
Je n’ai pas lu le «petit traité» initial, mais si c’est du même acabit que cette BD alors c’est clair que c’était précurseur !
Une superbe BD à offrir à votre beauf ou collègue handicapé de la voiture. Et si vous êtes colmarien, la BD est disponible à la médiathèque.
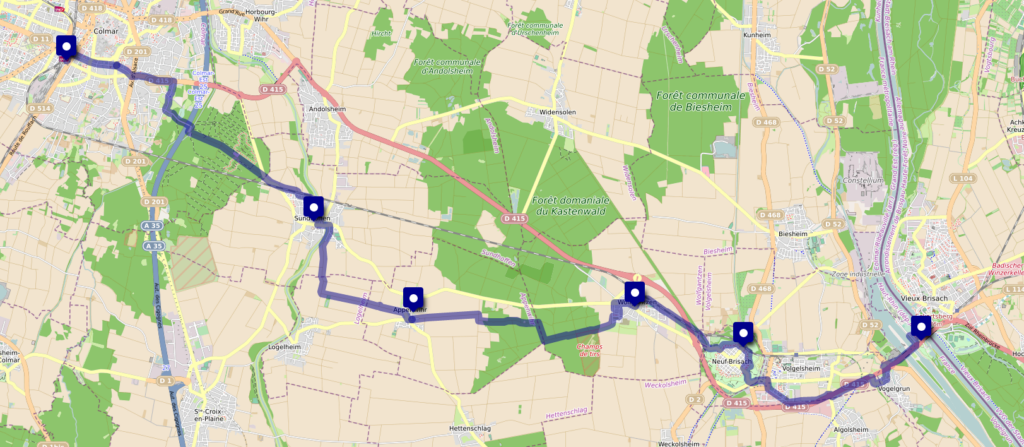
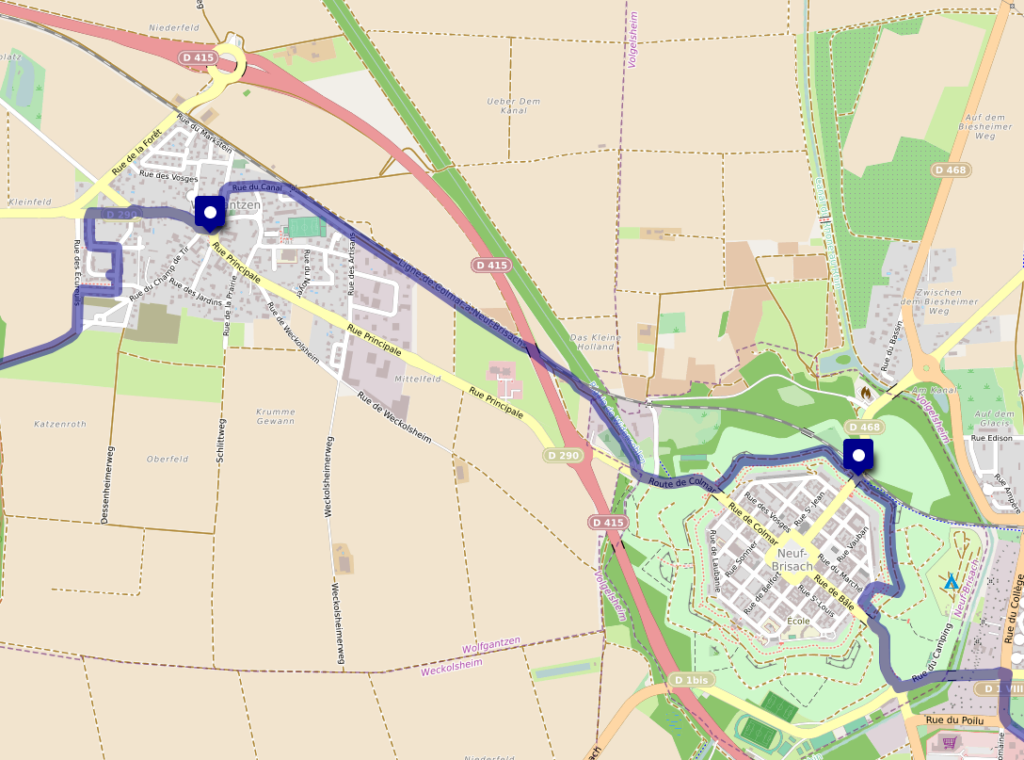
Le trajet vélo prévu pour se rendre à la chaîne humaine du 14 avril.
Il s’agit donc de tester ce trajet en avance histoire d’être sûr de pouvoir guider tout le monde correctement.
J’ai donc mis mon réveil (non) ce dimanche matin (7 avril) pour partir avec un vélo cargo tricycle depuis le quartier des maraîchers de Colmar (à coté de l’hôpital Schweitzer) départ à 8h36.
Je vous épargne ici le trajet depuis la gare, ayant déjà traité la piste cyclable de la honte dans un précédent article il suffira de s’y référer.
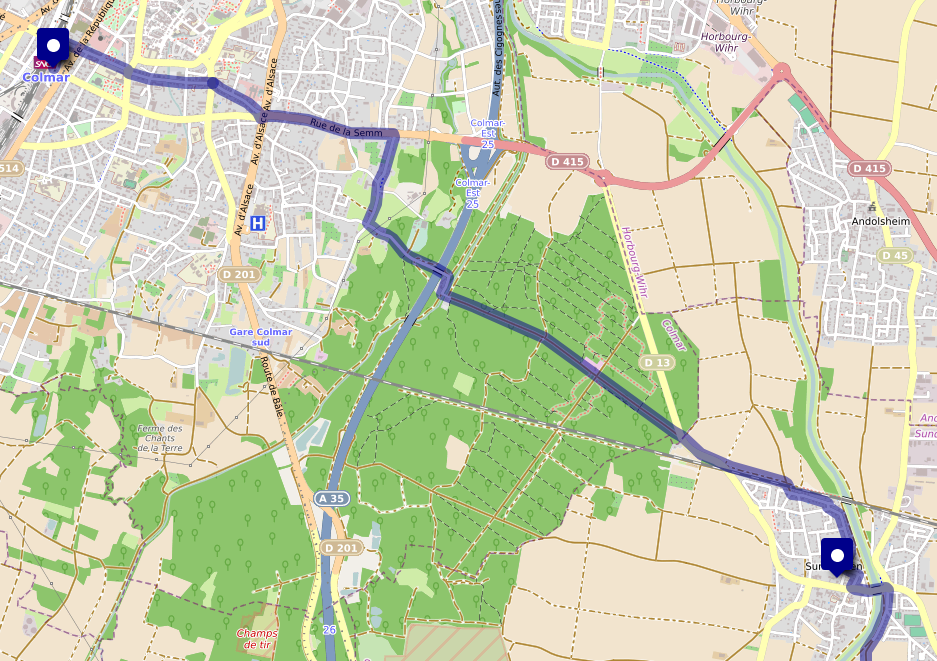
De Colmar à Sundhoffen, traversée de la forêt de l’autoroute. (8h36)
De Colmar à Sundhoffen
Forêt qui se prénomme plutôt la forêt du Neuland. Mais elle est traversée par l’autoroute que l’on entend un peu partout quand on s’y balade.
À l’entrée du chemin du Dachstbuhl on admirera la fin de zone 30 qui se poursuit par une route limitée … à 30 kmh. Bonjour la clarté de l’information.
La traversée de la forêt se fait sans trop d’encombre tout droit, une bonne partie est sans voiture et la sortie de la forêt débouche sur une belle piste cyclable séparée de la route. On aime, on vous en parle.
Le chemin asphalté est un plaisir au petit matin. Une partie de la route est cependant un peu abîmée par le passage des engins des forestiers de cet hiver.
La route sans voiture se termine à la moitié de la forêt, la suite se fera sur une route à 30km/h (mais très peu de voitures).
À la sortie du Neuland, la piste cyclable «à l’allemande» est correctement fléchée. Ça fait plaisir
On commence à apercevoir la ligne de chemin de fer Colmar-Freiburg ici. Cette étendue de gravillons est étrange. Parking ?
Première traversée de la LTÀD (Ligne de Train À Défendre)
L’arrivée dans Sundhoffen est bien fléchée et nous permet de nous rendre jusqu’au pont du centre ville.
Le pont de la Grand rue sur l’Ill possède une piste cyclable. L’entrée n’est pas évidente dans ce sens là mais la piste est bien.
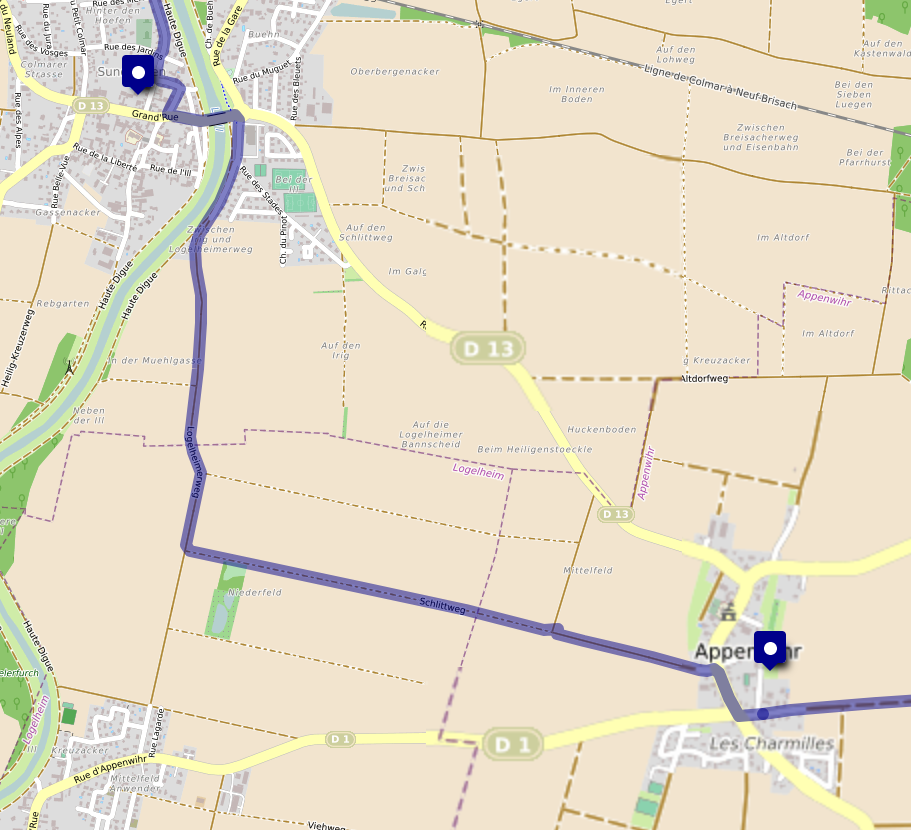
De Sundhoffen à Appenwihr (9h00)
Jusqu’ici, le trajet était bien balisé et assez «propre».
N’en déplaise aux pointillés, la route est asphalté.
C’est à partir de maintenant que l’on va chercher à contourner la D13 pour éviter le plus possible de se faire agresser par des automobilistes. Il va falloir connaître un peu pour retrouver la continuité cyclable.
Attention ici, il ne faut pas tourner complètement à droite pour aller sur la digue. Il faut prendre la rue de Logelheim avec la piste cyclable visible au centre gauche sur la photo.
Le chemin est de type «route de campagne» et parfaitement lisse/asphalté
Il faut rouler tout droit jusqu’à atteindre le marquage au sol qui nous indique de tourner à gauche vers Appenwihr
Un panneau que l’on ne croise pas souvent à Colmar. Mais si vous pouvez mettre un outils de labour derrière votre vélo ça sera encore mieux.
Le centre ville d’Appenwihr
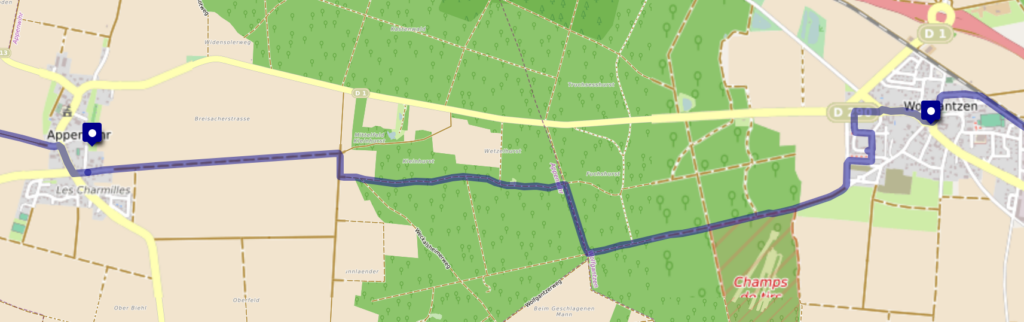
D’Appenwihr à Wolfgantzen, jouons au petit chaperon rouge (9h17)
Comme le petit chaperon rouge, il faudra traverser la forêt du loup (ou plutôt des chasseurs) pour amener le petit pot de lait à Wolfgantzen. Chercher à éviter la D13 s’est avéré un peu plus compliqué sur ce tronçon, peut-être que la route fonctionnerait, surtout un dimanche matin.
Traversé de la forêt des chasseurs
Chemin qui mène à la forêt du Kastenwald. Surnommé la rue des douches gratuites grâce aux arroseurs postés tout le long.
Le chemin qui mène à la forêt est asphalté mais moins lisse puis finit en chemin de terre «pas trop lisse mais ça va». La croisée des chemins se fait au bout.
Nous bifurquerons à droite pour prendre ensuite la première intersection à gauche et nous enfoncer dans la forêt.
Peut-être qu’à cet endroit il serai plus judicieux de prendre à gauche pour se mettre sur la D13 jusqu’à Wolfgantzen.
Alors là on est carrément dans du chemin de terre. Ça devient difficile avec un vélo cargo, mais ça passe … au ralenti (~8km/h)
Les panneaux ne sont pas hyper rassurants, mais tant que vous n’avez pas de moteur (thermique !) ça va.
Nope faut pas prendre à droite mais continuer tout droit.
Maison de mère-grand ou du loup ? Je dirais plutôt des chasseurs.
C’est ici qu’on va tourner à droite
pour se retrouver sur un chemin un peu plus praticable
Et ici on tourne à gauche…
…pour tourner le dos à compostelle
Arrivé à cet endroit la droite du chemin est parsemé de panneaux d’interdictions «terrain militaire», mais aucune barrière ni clôture ne la délimite. Ambiance ambiance. J’espère ne pas sauter sur une mine.
La sortie de la forêt n’est pas hyper cool pour les cyclistes … mais ça passe en cargo tricycles.
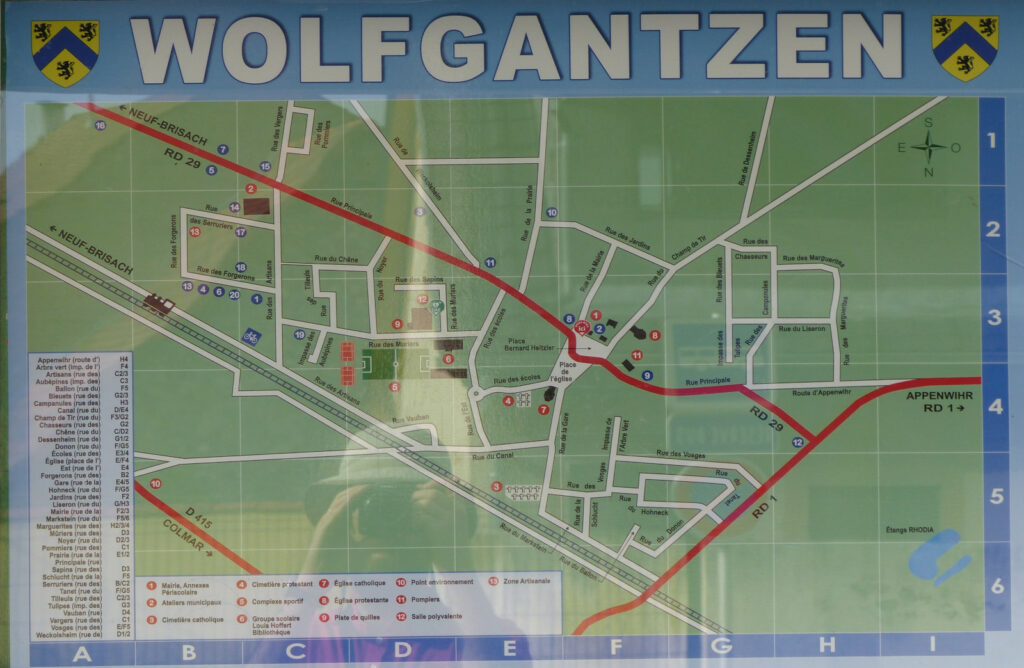
Arrivée sur Wolfgantzen
Wolfgantzen centre
De Wolfgantzen à Neuf-Brisach (9h46)
Contrairement à la trace indiquée ici, j’ai pris par le centre de Neuf-Brisach (et bin c’est moche !)
On va retrouver ici notre ligne ferroviaire chérie pour rejoindre le centre de Neuf-Brisach.
Depuis la place de l’église, il faut contourner l’église par la gauche puis prendre la rue du Canal et la rue des artisans. (Concentrez vous bon sang, n’essayez pas de voir mon reflet dans le panneau 😉
Le retour de la LTÀD, qu’il ne faut pas franchir.
Le trajet est bien fléché ici
Ça passe en cargo la barrière. Par contre, non je n’irais pas à 30km/h !
Passage sous la route pour le train et les vélos
Porte d’entrée de Neuf-Brisach, j’espère que vous avez vos lumières.
Centre de Neuf-Brisach
Neuf-Brisach est une ville étonnante. C’est une ville moche mais entourée par de très beaux remparts Vauban. Le centre n’a pas beaucoup d’intérêts, il vaut mieux en faire le tour.
De Neuf-Brisach à ArtRhena (10h00)
Ici pas la peine de tenter de prendre la D415, c’est quasiment une autoroute. Il va falloir tourner autour.
Le trajet peut sembler compliqué ici, mais c’est pas trop mal fléchés
À la sortie de Neuf-Brisach la piste cyclable nous amène sur le trottoir. Trottoir qui est relativement large mais fréquenté.
Trottoir
Le pont
À partir de cet endroit je me suis planté de chemin (par rapport à la trace). Je suis descendu par Algosheim pour remonter le long de la D415 ensuite. Mais le chemin était bien balisé et surtout composé de piste cyclables.
De retour sur la route vers Vogelgrun, en parallèle de la D415
Ouf un panneau vélo
Cette fois c’est sûr c’est le bon chemin
Mais oui, ça passe en cargo tricycle !
On y est presque, l’entrée du passage cyclable est donné par le panneau (carré) au centre
Ça monte mais on y est.
Le barrage
Passage de l’écluse et de la frontière
Arrivée à ArtRhena (10h36)
Apéro !
Pour conclure, un trajet de 2h en se trompant
Je n’avais pas activé l’assistance électrique du cargo (à vide) et je me suis planté de chemin deux fois, mon compteur indiquait une distance parcourue de 24km soit une vitesse moyenne de 12kmh environ.
C’est une balade sympathique qui peut être faite avec des enfants mais il faut qu’ils soient motivés ou dans le vélo 😉
Une fois arrivé le retour est beaucoup moins facile … car c’est un retour. Personnellement j’ai activé l’assistance du cargo et changé un peu le plan de route pour mettre 1h15 de trajet depuis ArtRhena.
L’idéal ça serait de faire le trajet aller en vélo pour ensuite revenir… en train !
La plupart des distsributions Linux possède un outils bien utile nommé input-remapper et qui s’installe avec apt sur ubuntu :
$ sudo apt install input-remapper
Le paquet «descend» un utilitaire de configuration graphique bien pratique :
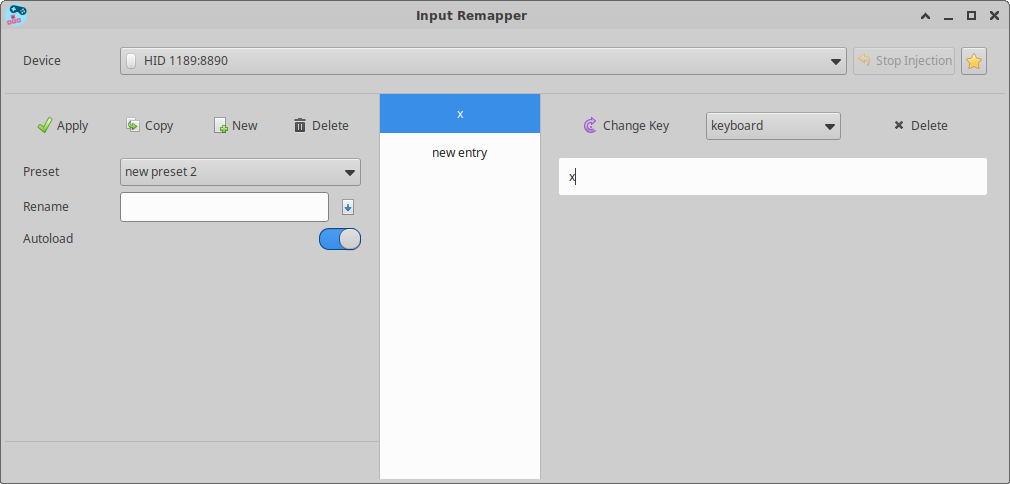
$ input-remapper-gtk
Input remapper permet de changer la fonctionnalité d’une touche
Problème : toutes les touches du miniclavier sont vues comme des x, et sont donc indiférenciées.
Il est visiblement nécessaire de configurer/corriger une couche plus «basse» du pilote de ce clavier.
ch57x-keyboard-tool
Une recherche sur le numéro de classe HID (1189:8890) dans duckduckgo fait apparaitre des projets github permettant de piloter des clavier ch57x. Les deux projets suivant semble être intéressants:
ch57x-keyboard-tool: Projet qui supporte toute la game des macro-keyboard trouvés sur aliexpress
hid-minikb-libusb: Projet qui semble se cantonner au 3×1 boutons + potentiomètre. Ce projet semble maintenu que par une seule personne.
Le projet ch57x-keyboard-tool semble être le plus abouti à première vue. On peut même télécharger une release compilé pour x86_64:
$ cd ~/Téléchargement/
$ wget https://github.com/kriomant/ch57x-keyboard-tool/releases/download/v1.2.4/ch57x-keyboard-tool-x86_64-unknown-linux-gnu.tar.gz
$ mkdir /opt/ch57x-keyboard-tool
$ cd /opt/ch57x-keyboard-tool
$ tar zxvf ~/Téléchargements/ch57x-keyboard-tool-x86_64-unknown-linux-gnu.tar.gz
$ ./ch57x-keyboard-tool
Usage: ch57x-keyboard-tool [OPTIONS] <COMMAND>
Commands:
show-keys Show supported keys and modifiers
validate Validate key mappings config on stdin
upload Upload key mappings from stdin to device
led Select LED backlight mode
help Print this message or the help of the given subcommand(s)
Options:
-h, --help Print help information
Internal options (use with caution):
--vendor-id <VENDOR_ID> [default: 4489]
--product-id <PRODUCT_ID> [default: 34960]
--address <ADDRESS>
--endpoint-address <ENDPOINT_ADDRESS>
Langage du code :JavaScript(javascript)
Un fichier de configuration en yaml est fourni example-mapping.yaml, il faut au minimum éditer le nombre et le type de touches :
Le truc fonctionne nickel. Par contre si vous êtes un gros nerd comme moi et que votre clavier n’est pas configuré en azerty (qwerty même) alors le mapping sera à revoir en fonction du votre (bépo chez moi 😉
Il faut arrêter d’entraver la circulation des véhicules à moteur. Fluidifions la circulation !
Les véhicules à moteur sont indispensable au bon fonctionnement de notre civilisation. Comment les pompiers peuvent-ils intervenir rapidement sur un sinistre s’ils sont entravés dans leurs cheminement ? Comment l’ambulance peut-elle arriver à temps aux urgences si les voitures ne peuvent pas circuler ? Et comment puis-je me rendre dans un village improbable si plus aucun taxi n’est capable de rouler ?
Sans parler des services de bus qui on besoin de voies dégagées pour circuler ou des handicapés (moteur) qui sont contraint d’utiliser des voitures pour être autonome.
Alors pensez-y la prochaine fois que vous irez encombrer les routes seul(e) dans votre gros SUV. Pensez à ces pompier qui vont devoir passer sur le trottoir parce que votre fer à repasser bloque la route. Pensez à cet handicapé qui ne pourra pas sortir de sa voiture parce que vous avez mis une tonne de métal à en travers de la place handicapés. Pensez donc à toutes ces personnes qui ont besoin de pouvoir circuler en voiture quand vous venez boucher les rues en klaxonnant.
Personnellement j’y pense toujours, et j’essaie le plus possible de me déplacer à vélo ou à pieds et en poussette pour les enfants. Vous y penserez la prochaine fois que vous viendrez mettre votre ferraille en travers du trottoir «juste pour 2 minutes» ? Vous penserez à ces enfants qui seront obligés de faire un détour par la route et se prendre une camionnette de livraison en pleine face (il y a des morts chaque années comme ça)? Vous y penserez quand vous chercherez coûte que coûte à doubler cette cycliste pour vous coller au feu rouge juste après ? Tant pis si vous la tuez, de toute manière elle n’avait pas de casque !
Vous êtes certes handicapé de la voiture, mais ça n’est pas de la faute des valides qui utilisent leurs jambes. Et c’est pas la peine de s’acharner à les rendre eux aussi handicapés.
Tous le monde ne peut pas se déplacer à vélo ou en transports en commun, mais tous le monde peut faire attention à celles et ceux qui le font.
Couverture du livre «La bataille du vélo» de Joseph D’halluin
Joseph D’halluin est l’ancien secrétaire national de la FUB (fédération française des usagers de la bicyclette), ce militant pro-vélo veut «renverser le système automobile à coup de pédales».
Ce livre synthétise plus de 10 ans de militantisme écologique et propose une stratégie de lutte pour faire reculer le système automobile qui a colonisé nos villes, nos campagnes et nos imaginaires.
L’auteur commence par un historique de la monté de l’automobilisme et nous montre que le système automobile est loin de s’être imposé naturellement comme on pourrait le penser. En effet, au début du vingtième siècle, la population a beaucoup combattu ce moyen de transport imposé par une petite portion (riche) de la population qui souhaitait dégager les routes et les rues pour leur seul confort personnel. Le livre embraye ensuite sur le problème du système automobile qui colonise tout les recoins de notre vie, que ça soit l’espace publique ou nos esprits.
La deuxième partie enfin parle de la bataille du vélo. Pourquoi le vélo est désirable dans nos villes et nos campagne ?
Comment rassembler des «communautés» qui ont intérêts à voir le déplacement à vélo se développer ? Certains combattent le vélo, les pistes cyclables et la piétonisations des rues alors qu’ils en sont presque les premiers bénéficiaires. On pense bien évidemment aux commerçants qui ont l’air d’ignorer que dans les centres villes, les clients ne viennent pas en voiture ! Mais on pense également aux taxis, en effet quel intérêt de faire appel à leurs services quand on peut se déplacer avec sa voiture ?
Un point important dans la bataille du vélo est qu’il n’y aura pas de grand soir. Il faut grignoter même quand ça n’est pas optimal, chaque avancée aussi petites soit-elle est bonne à prendre tant qu’on avance.
Il faut grignoter les espaces sur la bagnole. À Colmar, pour la piste cyclable de la honte par exemple, tant pis si on n’a pas de piste en site propre on pourrait marquer la route avec une piste cyclable partagée plutôt que de décorer le trottoir. Ça n’est pas optimum, c’est encore problématique, mais on grignote un peu de la place de la voiture.
De même, lorsque l’on ferme des voies à la circulation pour organiser des manifestations festives, que l’on fait des (vraies) journées sans voiture. Même si c’est le dimanche et que ça ne concerne que quelques zones, c’est déjà de l’espace et du temps de grignoté. La vision d’une ville sans voiture colonise ainsi les esprits.
De même, en parlant de colonisation des esprits, le petit message «préférez les transports en commun ou la marche» obligatoire dans les pub bagnole peu sembler particulièrement dérisoire. Mais il distille le message et grignote les esprits. Bien sûr qu’il faudra bien plus que ça mais la petite musique s’installe.
Le livre se termine sur les idées radicales vers lequel il faudrait tendre pour sortir du système automobile : interdiction de la publicité automobile, mise en place d’un quota de voitures autorisées à la circulation, autorisation de mise sur le marché des véhicules motorisé suivant leur utilités, bridage des véhicules, …
J’ai découvert après avoir lu le livre qu’il était la synthèse du site internet du même nom «La bataille du vélo». Un livre-manifeste qui donne de bonnes bases militantes pour reprendre la route et les rues.
Hmmm, j'ai pas l'impression que ça soit le sens du mot sycophante. D'après Wikipédia un sycophante est un délateur qui s’enrichit en dénonçant des délits sans intérêts. https://fr.wikipedia.org/wiki/Sycophante — Permalink